
| Schedule | Description | Speakers | Posters | Benchmarks |
| 09:00-09:30 | Workshop Introduction |
| 09:30-10:00 | Rachid Alami |
| 10:00-10:30 | Coffee Break |
| 10:30-11:00 | Esra Erdem |
| 11:00-11:30 | Kostas Bekris |
| 11:30-12:00 | Jan Rosell |
| 12:00-01:45 | Group Lunch and Discussion |
| 01:45-02:15 | Damien Petit |
| 02:15-02:30 | Lightning Talks |
| 02:30-03:00 | Coffee Break |
| 03:00-03:30 | Poster Session |
| 03:30-04:00 | Ross Knepper |
| 04:00-05:00 | Panel Discussion and Wrap-Up |
Complex robot behavior requires both discrete decisions and continuous motions. Task-Motion Planning (TMP) combines discrete and continuous decision-making and reasons about the interaction of these two domains.
TMP is a currently active research topic with related work proceeding in the robotics, AI, and formal methods communities. ICRA and IROS have seen increasing numbers of TMP papers and IJRR is soliciting contributions for a special issue on the topic. While work from different groups is similar in broad aim or technique, the focus often varies, e.g., between performing complex manipulation, finding optimal solutions, or handling uncertainty. The differences in focus, assumptions, and formats have resulted in significant challenges when attempting to compare different TMP methods.
This workshop will address the current limitation in TMP research to directly compare different planners. Before the workshop, we will distribute a set of benchmark problems developed from previous years' TMP workshops at RSS. Presenters and contributors at this workshop will adapt the benchmark problems to their planning system and discuss the results. Conversely, presenters may equally discuss why the benchmark is not compatible with their system, what assumptions differ, and how to produce a better benchmark. There will be a variety of benchmark problems, and presenters and contributors may select the benchmark set closest to their work. The focus of this workshop will not be on the specific performance of each planner, but rather on the suitably of the benchmark tests and how to go about comparing different TMP systems.
We hope that this workshop will lead to improved comparisons of TMP approaches by making explicit differing assumptions, identifying improvements to the benchmark set, and fixing suitable, standard formats for TMP problems. This proposal is not for a competition, as the current varying assumptions among TMP approaches limit our ability to make direct comparisons. However, we hope to ultimately use the results of this workshop to develop a future TMP competition.
This workshop is intended for researchers in robotics, AI planning, and motion planning who are interested in improving the autonomy of robots for complex tasks such as manipulation.
The two main target audiences for the workshop are: (1) members actively researching new methods, future trends and open questions in task and motion planning (2) people who are interested in learning about the current state-of-the-art in order to incorporate these methods into their own projects. We strongly encourage the participation of graduate students.
This workshop follows the previous workshops on Task and Motion Planning at RSS 2016 and RSS 2017 from the same organizers. Both workshops received excellent participation with over approximately 50 attendees, 10 presented posters, and engaging group discussions. During the previous workshops, a significant need was identified for better comparisons of different planning approaches. This workshop aims to address that need through direct comparisons of different planners and extended discussion of the assumptions and requirements to apply different planners to a shared set of benchmark problems.
Bio: Rachid Alami is a Senior Research Scientist and the Head of the Robotics and Interactions Group at LAAS-CNRS. His current research interests include the study of control architectures for autonomous robots, task and motion planning, multirobot cooperation, personal robots, and human–robot interaction. Rachid Alami received the Docteur-Ingenieur degree in computer science from the Institut National Polytechnique de Toulouse, Toulouse, France, in 1983. He joined the Robotics and Artificial Intelligence Group, LAAS-CNRS, Toulouse, in 1980.

Bio: Kostas Bekris is interested in designing algorithms for planning and coordinating the motion of robots and physically-realistic virtual agents. He received a Bachelor’s degree in Computer Science from the University of Crete in 2001. He then headed to Rice University in Houston, TX, where he completed both his Master’s (2004) and Doctoral (2008) degrees in Computer Science under the supervision of Prof. Lydia Kavraki. The title of his Ph.D. thesis was Informed Planning and Safe Distributed Replanning under Physical Constraints. On July 2008 he joined the Department of Computer Science and Engineering at the University of Nevada, Reno (UNR) as an Assistant Professor. On July 2012 he moved to Rutgers University and joined the Computer Science department as an Assistant Professor.
Title: Generalized Multi-Agent Pathfinding with Feasibility Checks
Abstract: Multi-agent pathfinding (MAPF) aims to plan, for each agent, a route from an initial location to a goal location in an environment such that no two agents collide with each other. We study a generalized version of MAPF (GMAPF) in the context of robotics (e.g., in a factory floor), where some robots must visit some locations (e.g., to pick/deliver some items) on the way to their destinations, and no robot collides with any obstacles in the environment. We present a novel method to solve such GMAPF problems, which combines incremental computation of routes using Answer Set Programming with feasibility checks of routes using sampling-based methods to ensure that the robots can follow collision-free trajectories. We conclude with a discussion of the use of GMAPF problems as a benchmark suite for studies that integrate task planning with motion planning.
Bio: Esra Erdem is an associate professor of Computer Science and Engineering at Sabanci University. She received her Ph.D. at the University of Texas at Austin in 2002. Her research involves Artificial intelligence and in particular, the mathematical foundations of Knowledge Representation and Reasoning and Cognitive Robotics, and their applications.
Bio:
Damien Petit is an assistant professor in the Department of Systems Innovation at Osaka University. He completed his Ph.D. at the CNRS-AIST Joint Robotics Laboratory.

Title: Which comes first, the task plan or the motion plan?
Abstract: Task and motion planning (TAMP) comprises two interdependent problems. Traditionally, research in this area has faced a chicken-and-egg dilemma: should we first propose symbolic task plans and then check them with a motion planner, or do we first attempt motion plans and then find out what is useful via the symbolic planner? Both options imply the possibility of wasting effort on plans that don't pan out on the other side, requiring backtracking. We survey the various methods by which research in this field has tried to connect task and motion planning. Recent methods have grown increasingly effective at minimizing wasted effort by interleaving the two planning problems. We introduce an approach that seeks to strike a balance by instead solving TAMP as a single planning problem in a common state space. We discuss lessons learned from this effort.
Bio: Ross Knepper's research addresses the algorithmic aspects of advanced factory automation, enabling autonomous robots to function safely and comprehensibly alongside humans in environments structured for people. Doing so will open up many products still assembled by hand today to automation opportunities. Leveraging insights from psychology, sociology, and linguistics, robots will interact with factory workers through natural language and gesture, so that they can be programmed without special training and can operate as peers with human workers. Robots must be aware of their environment and responsive to changes within it. In multi-robot deployments, a distributed planning and control approach is vital to enable scalability and provable correctness. He used IKEA furniture in the laboratory to demonstrate techniques in planning, control, perception and human interaction for automated assembly in the field.

Title: A relaxed and lazy use of geometric information to heuristically guide action selection for bi-manual robotic tasks
Abstract: This talk will present our latest developments to efficiently solve problems (requiring pick, place, and push actions) where an appropriate combination of task and motion planning levels plays an important role, like in constrained table-top problems for bi-manual robots. An heuristic task and motion planning approach based on the Fast Forward task planner will be introduced, in which the computation of the heuristic addresses a geometrically relaxed problem (reasoning upon objects placements, grasp poses, and inverse kinematics solutions), and motion paths are evaluated lazily (only after an action has been selected by the heuristic state space search). This reduces the number of calls to the motion planner, while backtracking is reduced because the heuristic captures most of the geometric constraints. Results of the proposal applied to several scenarios from the set of proposed benchmark problems will be provided, as well as some comments regarding requirements, assumptions done, missing issues and general considerations on the TMP benchmark tests.
Bio: Jan Rosell received the BS degree in Telecomunication Engineering and the PhD degree in Advanced Automation and Robotics from the Universitat Politècnica de Catalunya (UPC), Barcelona, Spain, in 1989 and 1998, respectively. He joined the Institute of Industrial and Control Engineering (IOC) in 1992 where he has developed research activities in robotics. He has been involved in teaching activities in Automatic Control and Robotics as Assistant Professor since 1996 and as Associate Professor since 2001. His current technical areas include task and motion planning, mobile manipulation, and robot co-workers.
Additional details and discussion are available at the TMP benchmarks wiki.
Description: Tower of Hanoi with mobile robots. See: S. Cambon, R. Alami, and F. Gravot. A hybrid approach to intricate motion, manipulation and task planning. The Int. Journal of Robotics Research, 2009..
Challenge: For ''n'' discs, ''2''''n'' - ''1'' moves
needed ! (in the non-geometric case)
Placing a disk on the
central rod may prevent, depending on their relative sizes, to
transfer discs from rod 1 to rod 3 (or vice versa).
Description:
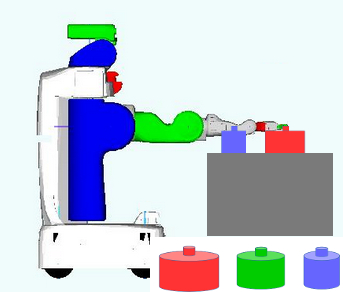
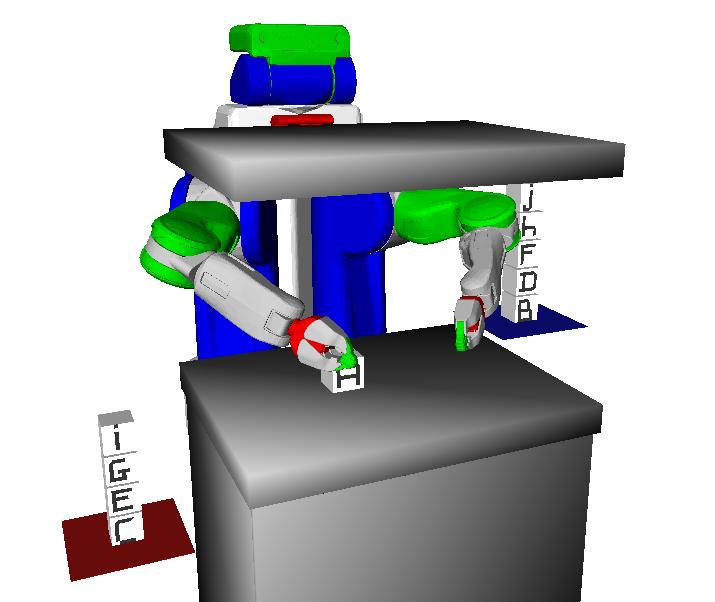
Using top-grasps only, and not using hand-over, stack the blocks in alphabetical order anywhere (on the table, or on one of the trays).
With a PR2 robot, the flying obstacle would be lower.
Challenge:
Because of the "flying obstacle", the pile cannot be built on the table or the green tray
Because of the "flying obstacle", no more than 2 blocks can be stacked on the table (then the wrist touches the obstacle).
Whether the red or blue tray is chosen as location for building the pile, both initial piles need to be unstacked somewhere, somewhere reachable by both arms: R. R is limited in size, and no more than 2 blocks can be stacked in this region, so there is a trade-off between: * a short symbolic plan with a cluttered R * a long symbolic plan with manageable R Here is an example example of solution.
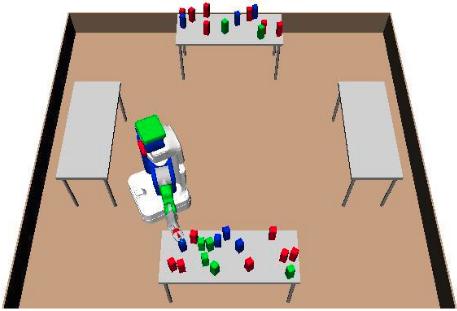
Description: The goal constraints are that all 7 blue blocks must be on the left table and all 7 green blocks must be on the right table. There are also 14 red blocks.
Challenge: The close proximity of the blocks forces the planner to carefully order its operations as well as to move red blocks out of the way.
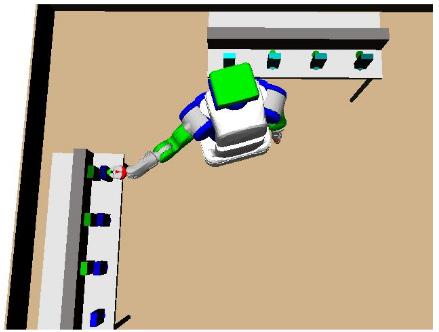
Description: The robot must move the green blocks from the left table to a corresponding position on the right table. Both the initial and goal poses are blocked by four blue and cyan blocks respectively.
Challenge: Critically, the blue and cyan blocks have goal conditions to remain in their initial poses. This is the source of the nonmonotonicity as the robot must undo several goals by moving the blue and cyan blocks in order to solve the problem.
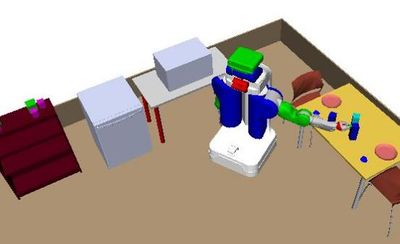
Description: The robot must prepare a meal by cleaning two glasses (blue blocks), cooking two cabbages (green blocks), and setting the table. Objects can be cleaned when placed on the dishwasher and cooked when placed on the microwave. An object must be cleaned before it can be cooked. Finally, the radishes (pink blocks) initially obstruct the cabbages on the shelf forcing the robot to move them. But, to maintain a tidy kitchen, the robot must also return them to their initial poses.
Challenge:
This benchmark demonstrates that these challenges do appear in target applications. It combines several criteria including blocking objects, non-monotonicity, and non-geometric actions (cleaning and cooking).